WHAT IS
3D RAD?
CLICK HERE
TO FIND OUT!
PathFinder
The PathFinder object is a guide for other objects that can move and follow 'targets' (like the Character object, the CarAI object or a user created script). The PathFinder object location is the goal to reach.
Run-time, the PathFinder object temporarily places itself at strategic locations on your project's terrain so that, the follower object, by moving towards it, will ultimately reach the goal going around static and moving obstacles (like a boulder suddenly falling on the path).
For a demonstration, please see the PathFinderDemo project, included to the 3D Rad installation.
The A.I. is designed to work reasonably well with moving target locations, as long as the speed is moderate. Typical case is when the PathFinder object is attached to the player's character and set to be the target for an enemy character.
If the PathFinder object is located at an inaccessible position (within a completely secluded area, on a hill beyond the maximum climbable slope, too close to an obstacle, too close to the ground or too far from it), the path finding algorithm will never 'solve the problem' and the follower object may not move as a result.
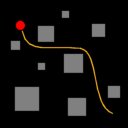
Keep in mind that the red star center (goal) should always be above the ground, at an height which is approximately the same as the follower object's center. Failing to place the goal properly will likely cause the path finder to fail.

If this option is not checked, the path finder will only operate after the object is started by another object, like for example EventOnInput.
Check this option to visualize the PathFinder object geometry run-time (a red star). This will be the goal that the PathFinder object will try to lead the character to.
If the altitude range doesn't include the stairs/slope top though, the area will be considered inaccessible.
The range is in meters and always computed from the current position of the path following object.
This list defines how the PathFinder object relates to the objects linked to it. The following relationship types are supported:
For example, if you are 'following' the path (PathFinder object location) by using a script, you will probably need to specify a script-controlled SkinMesh object as CHARACTER, to give the PathFinder object a reference.
Specifying more than one object as CHARACTER is not recommended.
The goal can also be attached to animated character bones, where necessary. For more information please see the Parent Bone ID parameter description in the SkinMesh object's help file.
For information about the remaining controls, please click here.
The following internal parameters can be controlled, run-time, by using a Script: